知能情報学部
教員一覧
ロボティクス研究室
研究内容
あらまし
ロボットの作業能力を高めるために,
物体や環境の識別情報に加えて,
スケジュールや行動方法などの知識を必要な場所や時点で得られる
知的な空間を構築する手法が考えられます.
それから発展すると,「もの」を識別する機器・装置や,
ロボットの位置推定手法など,
ロボットのための情報取得と利用方法を
情報サービスの提供などが考えられます.
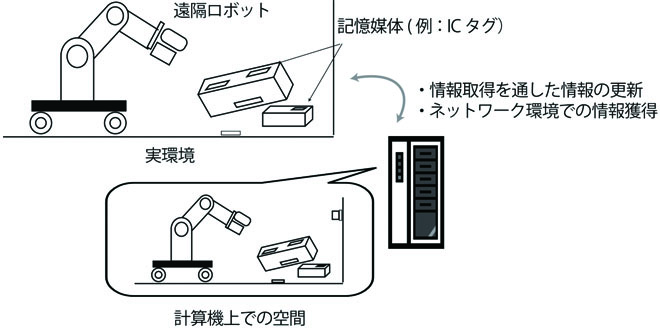 |
| 物体とその情報の一致 |
当研究室では,
ものを識別できるICタグを使った,
自動ロボットによる空間認識技術,無線LANなど
情報通信基盤を使った位置推定,情報蓄積手法などに興味を持っています.
そして,ロボットの情報処理を基にした「身の周り」情報処理,
すなわち,身の周りの情報を取得・加工し,情報機器やロボットを
使いやすくする研究を中心に取り組んでいます.
実際の建築物などでは,
大きさを伴うため,位置,姿勢に関連する情報の取り扱い,
空間センシングの技術が重要となります.
それらとロボットやわたしたちが持つ機器が取得できる情報との
関係を求め,ロボットの動作,
わたしたちへの情報提示に用いることを目的とします.
 |
| 「身の周り」情報処理 |
当研究室で扱う問題は,
ロボット単体が扱う情報のみではなく,
ロボットの動作生成,人の動きを利用したセンシング,
情報通信ネットワーク,アルゴリズムなど多岐にわたっています.
学生は,共通認識としての「ロボット」の数学的な表現を学び,
また,それらを基にした情報処理手法について習得し,
計算機,実機への実装を通して身につけていきます.
参考文献
-
梅谷智弘,山下知哉,田村祐一:
公衆無線LANアクセスポイントからの受信信号強度を用いた
複数階層環境における移動物体の位置推定”,第12回建設ロボットシンポジウム論文集,pp. 223 - 228, 2010.
-
Tomohiro UMETANI, Kenji INOUE and Tatsuo ARAI:
"Pose Estimation of Construction Materials using Multiple ID Devices
for Parts and Packets Unification,"
Computer-Aided Civil and Infrastructure Engineering, Vol. 26, Issue 5,
pp. 356 - 367, 2011.
DOI:
10.1111/j.1467-8667.2010.00691.x
-
Tomohiro UMETANI, Jun-ichi MORIOKA, Kenji INOUE,
Yasushi MAE and Tatsuo ARAI:
"Automated Three-Dimensional Pose Estimation
of Objects using Multiple ID Devices by Autonomous Robot,"
in Proc. of the 5th International Conference
on the Advanced Mechatronics (ICAM 2010), pp. 534 - 539, 2010.
-
梅谷智弘,横山清子:
“動作計測空間を利用した統合計測空間の構築とその応用”,
甲南大学紀要知能情報学編,Vol. 1,No. 1, pp. 129 - 140, 2008.
知能情報学部
教員一覧
ロボティクス研究室
Robotics Laboratory, Dept. of Intelligence & Informatics,
Konan University