Konan University
Department of Intelligence & Informatics
Faculty
Robotics Laboratory
Intelligent Environment for Robots using ID Devices
Overview
In this study, we propose a method for building the intelligent environment for robots using ID devices
in order that the robots can performs more complex tasks efficiently.
This figure shows the basic idea of the intelligent environment for the robots using ID devices.
For example, the left robot obtains the data of the structure of the environment.
On the other hand, the right robot obtains the data of the objects such as the owner of the object and the types of the object.
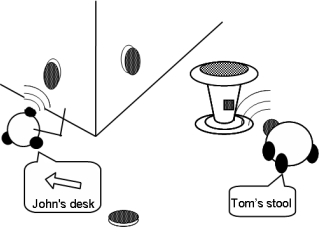 |
| Basic idea of intelligent environment for robots using ID devices. |
The characteristics of using ID devices to build the intelligent environment are shown as follows:
- The robots can acquire the required information for the tasks at the place where the robots performs the task.
- The robots can identify the objects in the environment using the ID devices correctly.
- The method for managing the data that the robots can obtain
using the ID device according to the change of the status of the environment is required.
In this study, several methods for managing the data of the object according to the change of the status of the environment are illustrated
to show feasibility of the proposed schema for building the intelligent environment using ID devices.
We use RFID devices as the ID devices in the experiment.
We are interested in the data fusion using multiple sensors in the environment such as the vision system and
the system integration of the robotic system based on the intelligent environment using ID devices.
References
- Tomohiro UMETANI, Tatsuo ARAI, Yasushi MAE, Kenji INOUE and Jun-ichiro MAEDA:
"Construction Automation Based on Parts and Packets Unification,"
Automation in Construction, Elsevier, Vol. 15, No. 6, pp. 777 - 784, 2006.
DOI:
10.1016/j.autcon.2005.10.013
- Tomohiro UMETANI, Yasushi MAE, Kenji INOUE and Tatsuo ARAI:
"Adaptive Relocation of Environment-Attached Storage Devices by Multiple Robots,"
in Proceedings of the 2001 IEEE International Conference on Robotics and Automation,
pp. 2998 - 3003. Seoul, Korea, May 2001.
-
Tomohiro UMETANI, Yasushi MAE, Kenji INOUE, Tatsuo ARAI and Jun-ichi YAGI:
"Automated Handling of Construction Components Based on Parts and Packets Unification,"
in Proceedings of the 20th International Symposium on Automation and Robotics in Construction,
pp. 339 - 344, Eindhoven, the Netherlands, September 2003.
Konan University
Department of Intelligence & Informatics
Faculty
Robotics Laboratory
Tomohiro UMETANI
Robotics Laboratory, Dept. of Intelligence & Informatics,
Konan Univesrity