 |
| 添付型記憶媒体を用いたロボットによる情報取得 |
ロボットは,作業対象となる物体や周囲の環境情報を取得して,人間やロボット自身によって与えられた作業を達成する.ロボット自身により作業情報をすべて取得するのは困難であり,例えば,新たに環境に入った物体などの,種類や形状,使用目的などは,(人間がそうであるように)外部の情報源を利用して取得することが望まれる.また,ロボットは環境内のすべての物体の情報を知る必要はなく,作業を達成するその場で必要となる情報を取得すればよいといえる.そこで,ロボットが物体や周囲環境に関する情報を取得しやすい状況を構築することを考える.この操作を物体や環境の情報化と呼ぶこととし,特に,ICタグなどに代表される添付型記憶媒体を用いた物体や環境の情報化手法を考える.
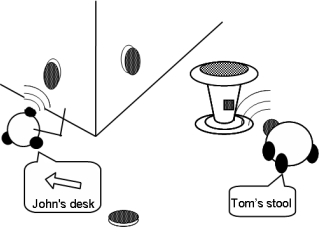
ここで,ICタグなど添付型記憶媒体を利用した物体と環境の情報化と,それを利用したロボット作業の一例の概念図を示す.図中左のロボットは環境に取り付けられた記憶媒体を利用して環境の構造に関する情報を取得している.一方,右のロボットは環境中の物体に添付された記憶媒体を利用して,環境中の物体情報(それが何であるか,所有者など)を取得している.
|
| 添付型記憶媒体を用いたロボットによる情報取得 |
本手法の特徴として,作業を達成するための情報をその場で使用できることがあげられる.一方,情報を記憶媒体を通して取得するため,物体とその周囲環境の状態変化への対応が,課題となる.記憶媒体を利用して取得した情報が正しいことは,本手法が成立するための必要条件となる.これに対して,添付型記憶媒体が持つ機能と,その機能を生かすことで発揮される効果を考え,それらを具体的な問題として解決することが本研究の目的である.
添付型記憶媒体の機能として,情報を取得する機能,物体を識別する機能,読み取り器の読み取り可能範囲内に記憶媒体が存在することを示す機能が考えられる.そこで,組み合わさった物体に関する情報更新手法や,複数の記憶媒体からの情報取得を利用した物体の位置姿勢推定法を提案し,有用性を示した.今後の課題として,カメラに代表される外部センサ機器を利用した,対象物体や人物の追跡手法の確立,および,それを実現するシステムの統合などがあげられる.